> ## Documentation Index
> Fetch the complete documentation index at: https://docs.phospho.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# Record a robotics dataset
> How to record a robotics dataset with your robot?
The easiest way to record datasets is to use the phospho Meta Quest app to control your robot arm.
Recorded datasets are saved in the `lerobot_v2` format from **[LeRobot](https://huggingface.co/lerobot)** and uploaded to your HuggingFace account.
Alternatively, you can implement your own dataset recording logic on top of the phospshobot API. Use the [Start Recording Episode](/recording/start-recording-episode) and [Stop Recording Episode](/recording/stop-recording-episode) endpoints to start and stop recording episodes. You can also read the [joints positions](/control/read-joints).
## Prerequisites
1. You need a robot arm such as the SO-100, the SO-101, or [other compatible hardware](https://github.com/phospho-app/phosphobot). Get the [phosphot starter pack here](https://robots.phospho.ai).
2. Install [the phosphobot software](/installation)
```bash macOS theme={null}
curl -fsSL https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.sh | bash
```
```bash Linux theme={null}
curl -fsSL https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.sh | sudo bash
```
```powershell Windows theme={null}
powershell -ExecutionPolicy ByPass -Command "irm https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.ps1 | iex"
```
```bash uv (Linux and macOS) theme={null}
# Install uv: https://docs.astral.sh/uv/
curl -LsSf https://astral.sh/uv/install.sh | sh
# Run phosphobot
uvx phosphobot@latest run
```
```powershell uv (Windows) theme={null}
# Install uv: https://docs.astral.sh/uv/
powershell -ExecutionPolicy ByPass -c "irm https://astral.sh/uv/install.ps1 | iex"
# Run phosphobot
uvx phosphobot@latest run
```
3. Connect your cameras to the computer. Start the phosphobot server.
```bash theme={null}
phosphobot run
```
4. Complete the [quickstart](/so-100/quickstart) and check that you can [control your robot](/basic-usage/teleop).
5. You have the **[phosphobot teleoperation app](/examples/teleop)** is installed on your **Meta Quest 2, Pro, 3 or 3s**
Unlock access to VR Control, advanced AI training, and more.
Get the phospho teleoperation app on the Meta Store for Meta Quest 2, Pro, 3, and 3s.
If you bought our [phospho starter pack](https://robots.phospho.ai/starter-pack), you should have received a link to get the phospho teleoperation Meta Quest app. Please [reach out](mailto:contact@phospho.ai) if not.
# 1. Set up your Hugging Face token
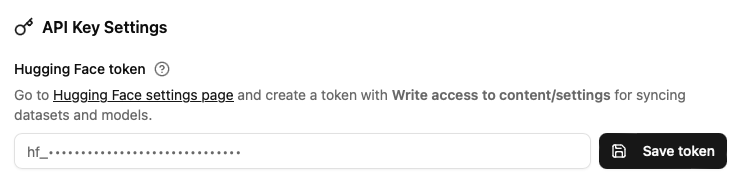
To sync datasets, you need a Hugging Face token with write access. Follow these steps to generate one:
1. Log in to your Hugging Face account. You can create [one here for free](https://huggingface.co)
2. Go to **Profile** and click **Access Tokens** in the sidebar.
3. Select the **Write** option to grant write access to your account. This is necessary for creating new datasets and uploading files. Name your token and click **Create token**.
4. **Copy the token** and **save it** in a secure place. You will need it later.
5. Make sure the phosphobot server is running. Open a browser and access `localhost` or `phosphobot.local` if you're using the control module. Then go to the Admin Configuration.
6. **Paste the Hugging Face token**, and **save it**.
## 2. Set your dataset name and parameters
Go to the *Admin Configuration* page of your phospshobot dashboard. You can adjust settings. The most important are:
* **Dataset Name**: The name of the dataset you want to record.
* **Task**: A text description of the task you're about to record. For example: *"Pick up the lego brick and put it in the box"*. This helps you remember what you recorded and is used by some AI models to understand the task.
* **Camera**: The cameras you want to record. By default, all cameras are recorded. You can select the cameras to record in the Admin Configuration.
* **Video Codec**: The video codec used to record the videos. The default is `AVC1`, which is the most efficient codec. If you're having compatibility issues due to unavailable codecs (eg on Linux), switch to `mp4v` which is more compatible.
## 3. How to record a dataset using the phosphobot teleoperation Meta Quest app?
The phospho teleoperation app works with a [Meta Quest](https://www.meta.com/fr/quest/quest-3/?srsltid=AfmBOorMLUmJKFQr35ssCi1DDqSNgpHk0sLHqo_tHG8kgclCYbMToAPa). Compatible models: Pro, 2, 3, 3s.
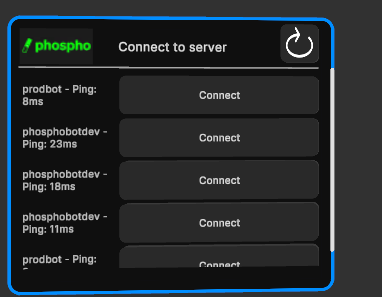
1. In the Meta Quest, open the phospho teleop application. Wait a moment, then you should see a row displaying **phosphobot** or your computer name. Click the **Connect** button using the `Trigger Button`.
Make sure you're connected to the same WiFi as the phosphobot server or the control moduleIf you don't see the server, check the IP address and port of the server in the phosphobot dashboard and enter it manually.
2. After connecting, you'll see the list of connected cameras and recording options.
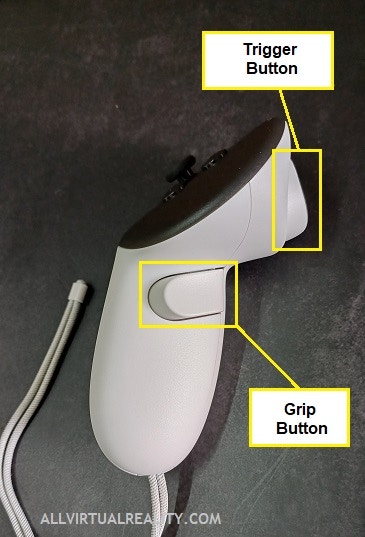
* Move the windows with the `Grip button` to organize your space.
* Enable preview to see the camera feed. Check the **camera angles** and adjust their positions if needed.
We recommend **disabling** the camera preview to save bandwidth.
3. Press `A` once to start teleoperation and begin moving your controller.
* The robot will naturally follow the movement of your controller. Press the `Trigger button` to close the gripper.
* Press `A` again to stop the teleoperation. The robot will stop.
4. Press `B` to start recording. You can leave the default settings for your first attempt.
* Press `B` again to stop the recording.
* Press `Y` (left controller) to discard the recording.
5. Continue teleoperating and stop the recording by pressing `B` when you're done.
6. The recording is automatically saved in **LeRobot v2** format and **uploaded to your HuggingFace account.**
## 4. Check your dataset
Datasets are saved on the computer running the phosphobot server at `~/phosphobot/recordings/DATASET_NAME` folder in the phosphobot directory. Explore the recordings in the phosphobot dashboard using the *Dataset Browser*.
If you added your Hugging Face token in the dashboard, the recorded datasets are **automatically uploaded to your HuggingFace account.**
Go to your [Hugging Face profile](https://huggingface.co) to see the uploaded datasets.
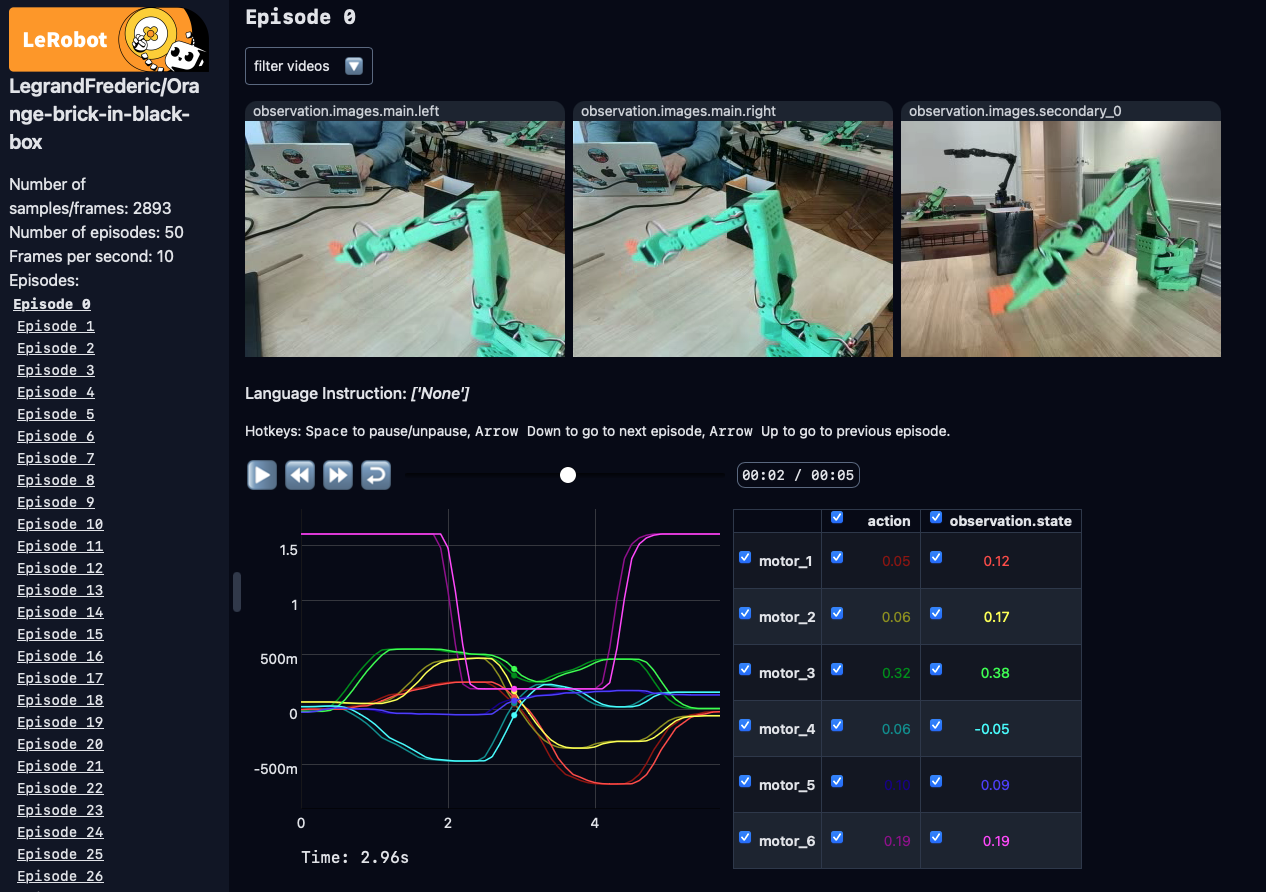
## 5. Visualize your dataset
Once your dataset is uploaded to HuggingFace, you can view it using the [LeRobot Dataset Visualizer](https://huggingface.co/spaces/lerobot/visualize_dataset).
The dataset visualizer only works with the `AVC1` video codec. If you used another codec, you may see black screens in the video preview.
Preview directly the videos files in a video player by opening your recording locally: `~/phosphobot/recordings/lerobot_v2/DATASET_NAME/video`.
Looking good? You're ready to train your AI model!
# What's next
How to train an AI model from a dataset you recorded
 ## 2. Set your dataset name and parameters
Go to the *Admin Configuration* page of your phospshobot dashboard. You can adjust settings. The most important are:
* **Dataset Name**: The name of the dataset you want to record.
* **Task**: A text description of the task you're about to record. For example: *"Pick up the lego brick and put it in the box"*. This helps you remember what you recorded and is used by some AI models to understand the task.
* **Camera**: The cameras you want to record. By default, all cameras are recorded. You can select the cameras to record in the Admin Configuration.
* **Video Codec**: The video codec used to record the videos. The default is `AVC1`, which is the most efficient codec. If you're having compatibility issues due to unavailable codecs (eg on Linux), switch to `mp4v` which is more compatible.
## 3. How to record a dataset using the phosphobot teleoperation Meta Quest app?
## 2. Set your dataset name and parameters
Go to the *Admin Configuration* page of your phospshobot dashboard. You can adjust settings. The most important are:
* **Dataset Name**: The name of the dataset you want to record.
* **Task**: A text description of the task you're about to record. For example: *"Pick up the lego brick and put it in the box"*. This helps you remember what you recorded and is used by some AI models to understand the task.
* **Camera**: The cameras you want to record. By default, all cameras are recorded. You can select the cameras to record in the Admin Configuration.
* **Video Codec**: The video codec used to record the videos. The default is `AVC1`, which is the most efficient codec. If you're having compatibility issues due to unavailable codecs (eg on Linux), switch to `mp4v` which is more compatible.
## 3. How to record a dataset using the phosphobot teleoperation Meta Quest app?
 2. After connecting, you'll see the list of connected cameras and recording options.
* Move the windows with the `Grip button` to organize your space.
* Enable preview to see the camera feed. Check the **camera angles** and adjust their positions if needed.
2. After connecting, you'll see the list of connected cameras and recording options.
* Move the windows with the `Grip button` to organize your space.
* Enable preview to see the camera feed. Check the **camera angles** and adjust their positions if needed.
 3. Press `A` once to start teleoperation and begin moving your controller.
* The robot will naturally follow the movement of your controller. Press the `Trigger button` to close the gripper.
* Press `A` again to stop the teleoperation. The robot will stop.
4. Press `B` to start recording. You can leave the default settings for your first attempt.
* Press `B` again to stop the recording.
* Press `Y` (left controller) to discard the recording.
5. Continue teleoperating and stop the recording by pressing `B` when you're done.
6. The recording is automatically saved in **LeRobot v2** format and **uploaded to your HuggingFace account.**
## 4. Check your dataset
Datasets are saved on the computer running the phosphobot server at `~/phosphobot/recordings/DATASET_NAME` folder in the phosphobot directory. Explore the recordings in the phosphobot dashboard using the *Dataset Browser*.
If you added your Hugging Face token in the dashboard, the recorded datasets are **automatically uploaded to your HuggingFace account.**
Go to your [Hugging Face profile](https://huggingface.co) to see the uploaded datasets.
## 5. Visualize your dataset
Once your dataset is uploaded to HuggingFace, you can view it using the [LeRobot Dataset Visualizer](https://huggingface.co/spaces/lerobot/visualize_dataset).
3. Press `A` once to start teleoperation and begin moving your controller.
* The robot will naturally follow the movement of your controller. Press the `Trigger button` to close the gripper.
* Press `A` again to stop the teleoperation. The robot will stop.
4. Press `B` to start recording. You can leave the default settings for your first attempt.
* Press `B` again to stop the recording.
* Press `Y` (left controller) to discard the recording.
5. Continue teleoperating and stop the recording by pressing `B` when you're done.
6. The recording is automatically saved in **LeRobot v2** format and **uploaded to your HuggingFace account.**
## 4. Check your dataset
Datasets are saved on the computer running the phosphobot server at `~/phosphobot/recordings/DATASET_NAME` folder in the phosphobot directory. Explore the recordings in the phosphobot dashboard using the *Dataset Browser*.
If you added your Hugging Face token in the dashboard, the recorded datasets are **automatically uploaded to your HuggingFace account.**
Go to your [Hugging Face profile](https://huggingface.co) to see the uploaded datasets.
## 5. Visualize your dataset
Once your dataset is uploaded to HuggingFace, you can view it using the [LeRobot Dataset Visualizer](https://huggingface.co/spaces/lerobot/visualize_dataset).