Subscribe to phospho pro to unlock VR control
Unlock access to VR Control, advanced AI training, and more.
Lifetime access to the phospho teleoperation app
Get the phospho teleoperation app on the Meta Store for Meta Quest 2, Pro, 3, and 3s.
If you bought our phospho starter pack, you should have received a link to get the phospho teleoperation Meta Quest app. Please reach out if not.
Prerequisites
- You need a robot arm such as the SO-100, the SO-101, or other compatible hardware. Get the phosphot starter pack here.
- Install the phosphobot software on your computer.
- Connect robots to your computer. Start the phosphobot server.
- Complete the quickstart and check that you can control your robot.
- The phosphobot teleoperation app is installed on your Meta Quest 2, Pro, 3 or 3s. >
Subscribe to phospho pro to unlock VR control
Unlock access to VR Control, advanced AI training, and more.
Lifetime access to the phospho teleoperation app
Get the phospho teleoperation app on the Meta Store for Meta Quest 2, Pro, 3, and 3s.
If you bought our phospho starter pack, you should have received a link to get the phospho teleoperation Meta Quest app. Please reach out if not.
How to control your robot arm with the Meta Quest app? Step by step instructions
The phospho teleoperation app works with a Meta Quest. Compatible models: Pro, 2, 3, 3s.
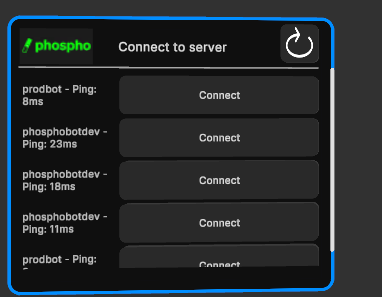
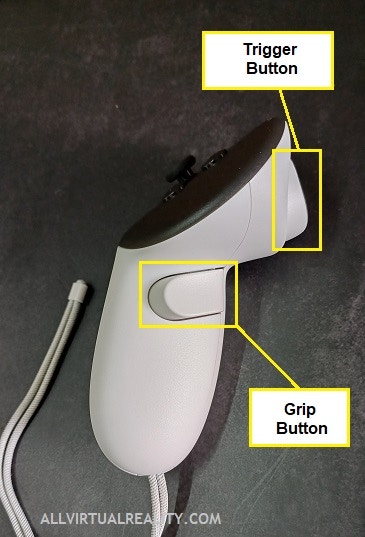
- In the Meta Quest, open the phospho teleop application. Wait a moment, then you should see a row displaying phosphobot or your computer name. Click the Connect button using the
Trigger Button.
Make sure you’re connected to the same WiFi as the phosphobot server or the control module
If you don’t see the server, check the IP address and port of the server in the phosphobot dashboard and enter it manually.
- After connecting, you’ll see the list of connected cameras and recording options.
- Move the windows with the
Grip buttonto organize your space. - Enable preview to see the camera feed. Check the camera angles and adjust their positions if needed.
We recommend disabling the camera preview to save bandwidth.
-
Press
Aonce to start teleoperation and begin moving your controller.- The robot will naturally follow the movement of your controller. Press the
Trigger buttonto close the gripper. - Press
Aagain to stop the teleoperation. The robot will stop.
- The robot will naturally follow the movement of your controller. Press the
-
Press
Bto start recording. You can leave the default settings for your first attempt.- Press
Bagain to stop the recording. - Press
Y(left controller) to discard the recording.
- Press
-
Continue teleoperating and stop the recording by pressing
Bwhen you’re done. - The recording is automatically saved in LeRobot v2 format and uploaded to your HuggingFace account.
Examples of VR control
The phospho Meta Quest app lets you operate the robot arm in real time. With the built-in stereo camera system, you can see the robot’s environment in 3D, allowing you to interact as if you were physically present.
What’s next?
Use your recorded datasets to train AI models.Train your first AI model
Follow this guide to teleoperate the robot arm and train your first AI model.