What is LeRobot?
 LeRobot is a platform designed to make real-world robotics more accessible for everyone. It provides pre-trained models, datasets, and tools in PyTorch.
It focuses on state-of-the-art approaches in imitation learning and reinforcement learning.
With LeRobot, you get access to:
LeRobot is a platform designed to make real-world robotics more accessible for everyone. It provides pre-trained models, datasets, and tools in PyTorch.
It focuses on state-of-the-art approaches in imitation learning and reinforcement learning.
With LeRobot, you get access to:
- Pretrained models for robotics applications
- Human-collected demonstration datasets
- Simulated environments to test and refine AI models
Step by step guide
In this guide, we will use the phospho starter pack to record a dataset and upload it to Hugging Face.Prerequisites
- You need an assembled SO-100 robot arm and cameras. Get the phosphot starter pack here.
- Install the phosphobot software
- Connect your cameras to the computer. Start the phosphobot server.
- Complete the quickstart and check that you can control your robot.
- You have the phosphobot teleoperation app is installed on your Meta Quest 2, Pro, 3 or 3s
Subscribe to phospho pro to unlock VR control
Unlock access to VR Control, advanced AI training, and more.
Lifetime access to the phospho teleoperation app
Get the phospho teleoperation app on the Meta Store for Meta Quest 2, Pro, 3, and 3s.
If you bought our phospho starter pack, you should have received a link to get the phospho teleoperation Meta Quest app. Please reach out if not.
- You have a device to train your model. We recommend using a GPU for faster training.
1. Set up your Hugging Face token
To sync datasets, you need a Hugging Face token with write access. Follow these steps to generate one:- Log in to your Hugging Face account. You can create one here for free
- Go to Profile and click Access Tokens in the sidebar.
- Select the Write option to grant write access to your account. This is necessary for creating new datasets and uploading files. Name your token and click Create token.
- Copy the token and save it in a secure place. You will need it later.
-
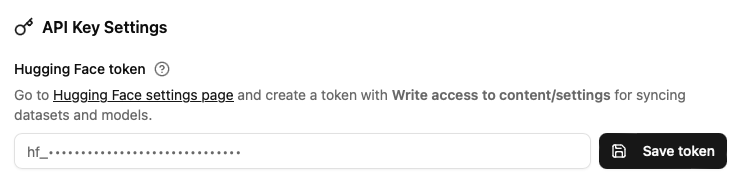
Make sure the phosphobot server is running. Open a browser and access
localhostorphosphobot.localif you’re using the control module. Then go to the Admin Configuration. - Paste the Hugging Face token, and save it.
2. Set your dataset name and parameters
Go to the Admin Configuration page of your phospshobot dashboard. You can adjust settings. The most important are:- Dataset Name: The name of the dataset you want to record.
- Task: A text description of the task you’re about to record. For example: “Pick up the lego brick and put it in the box”. This helps you remember what you recorded and is used by some AI models to understand the task.
- Camera: The cameras you want to record. By default, all cameras are recorded. You can select the cameras to record in the Admin Configuration.
- Video Codec: The video codec used to record the videos. The default is
AVC1, which is the most efficient codec. If you’re having compatibility issues due to unavailable codecs (eg on Linux), switch tomp4vwhich is more compatible.
3. Control the robot in the Meta Quest app
The easiest way to record a dataset is to use the Meta Quest app.Subscribe to phospho pro to unlock VR control
Unlock access to VR Control, advanced AI training, and more.
Lifetime access to the phospho teleoperation app
Get the phospho teleoperation app on the Meta Store for Meta Quest 2, Pro, 3, and 3s.
If you bought our phospho starter pack, you should have received a link to get the phospho teleoperation Meta Quest app. Please reach out if not.
The phospho teleoperation app works with a Meta Quest. Compatible models: Pro, 2, 3, 3s.
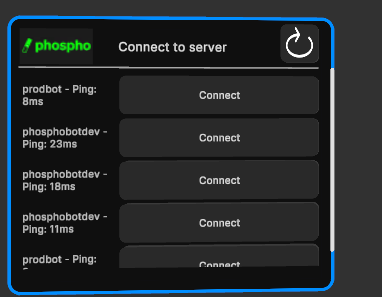
- In the Meta Quest, open the phospho teleop application. Wait a moment, then you should see a row displaying phosphobot or your computer name. Click the Connect button using the
Trigger Button.
Make sure you’re connected to the same WiFi as the phosphobot server or the control module
If you don’t see the server, check the IP address and port of the server in the phosphobot dashboard and enter it manually.
- After connecting, you’ll see the list of connected cameras and recording options.
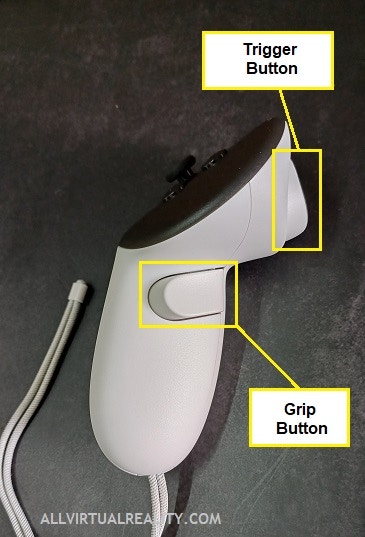
- Move the windows with the
Grip buttonto organize your space. - Enable preview to see the camera feed. Check the camera angles and adjust their positions if needed.
We recommend disabling the camera preview to save bandwidth.
-
Press
Aonce to start teleoperation and begin moving your controller.- The robot will naturally follow the movement of your controller. Press the
Trigger buttonto close the gripper. - Press
Aagain to stop the teleoperation. The robot will stop.
- The robot will naturally follow the movement of your controller. Press the
-
Press
Bto start recording. You can leave the default settings for your first attempt.- Press
Bagain to stop the recording. - Press
Y(left controller) to discard the recording.
- Press
-
Continue teleoperating and stop the recording by pressing
Bwhen you’re done. - The recording is automatically saved in LeRobot v2 format and uploaded to your HuggingFace account.
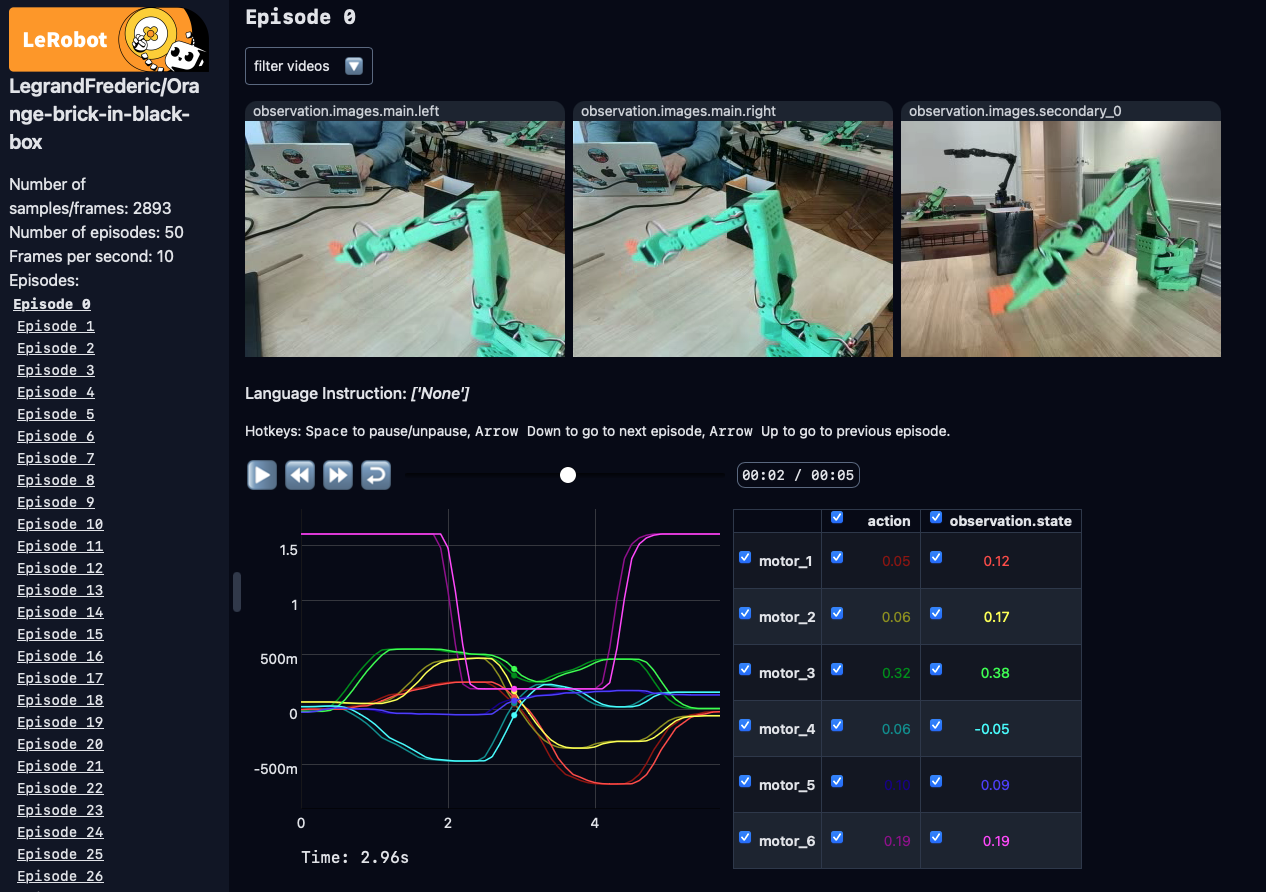
The dataset visualizer only works with
AVC1 video codec. If you used another
codec, you may see black screens in the video preview. Preview directly the
videos files in a video player by opening your recording locally:
~/phosphobot/recordings/.4. Train your first model
Train GR00T-N1-2B, Pi0.5, ACT, BB_ACT in one click with phosphobot cloud
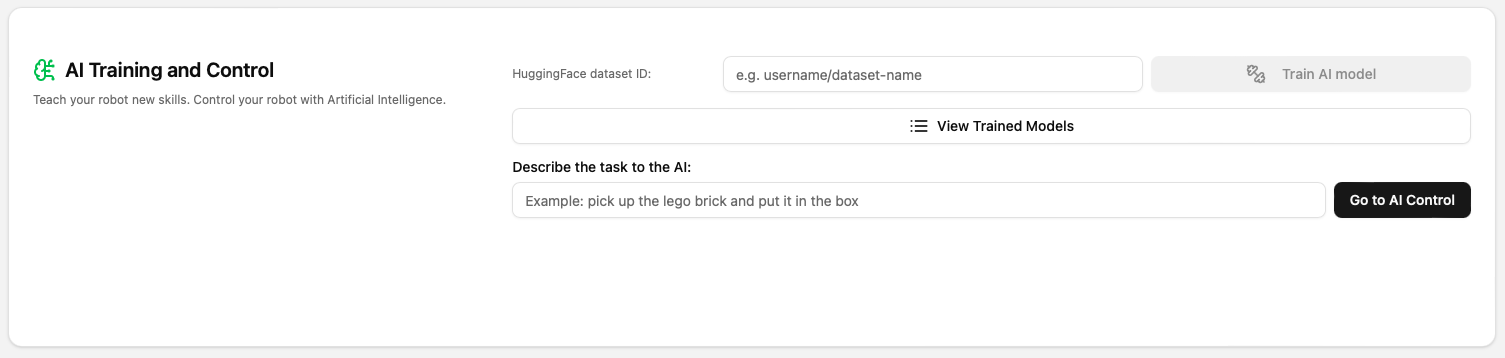
To train a model, you can use the phosphobot cloud. This is the quickest way to train a model.- Enter the name of your dataset on Hugging Face (example:
PLB/simple-lego-pickup-mono-2) in the AI Training and Control section. - Select the parameters you want to change or leave the default ones.
- Click on Train AI Model. Your model starts training. Training can take up to 3 hours. Follow the training using the button View trained models. Your model is uploaded to HuggingFace on the phospho-app account.
- To control your robot with the trained model, go to the Control your robot section and enter the name of your model.
Train with phosphobot cloud
Learn how to train a model with phosphobot cloud
Control your robot with GR00T-N1-2B
Learn about controlling your robot with GR00T-N1-2B and phosphobot cloud
Train an ACT model locally with LeRobot
This guide will show you how to train the ACT model locally using LeRobot for your SO-100 robot.- Install uv, the modern Python package manager.
- Set up training environment.
- (MacOS only) Set environment variables for torch compatibility:
- (Optional) Add the Weight & Biases integration for training metrics tracking:
- Run training script - Adjust parameters based on your hardware:
lerobot/outputs/train/.
- (Optional) Upload the model to Hugging Face. Login to HuggingFace CLI:
5. Control your robot with the ACT model
- Launch ACT inference server (Run on GPU machine):
- Make sure the phosphobot server is running to control your robot:
- Create inference client script (Copy the content into
my_model/client.py):
- Run the inference script:
Ctrl + C.
What’s next?
Next, you can use the trained model to control your robot. Head to our guide to get started!Policies
Learn more about Robotics AI models
Discord
Join the Discord to ask questions, get help from others and get updates (we
ship almost daily)