Get your SO-100 robot arm
The SO-100 robot arm is a 5-DOF robotic arm with a 1-DOF gripper. It’s a popular robot arm for AI robotics, with many users. The SO-100 robot arm is open source and can be built using off-the-shelf components and 3D printed parts. If you’re looking to buy SO-100 robot arms already assembled, with cameras and software, you can get a starter pack on our shop.How to build the SO-100 leader arm? Step by step assembly guide
Here is a step-by-step video guide to build the SO-100 robot arm:Attach the SO-100 arm
Find a table and fix the SO-100 robot arm using the 2 table clamps in the kit (see image below).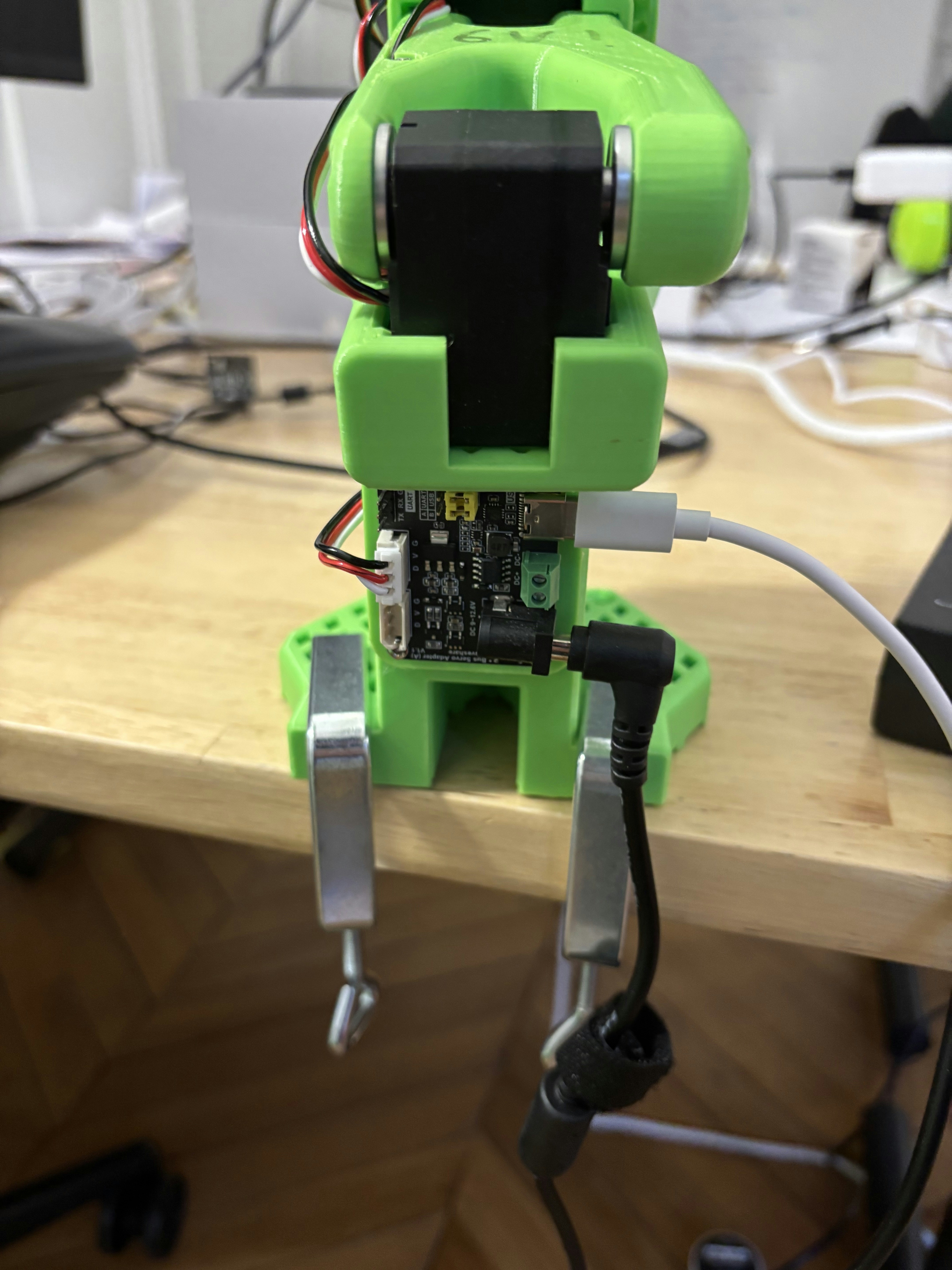
Plug everything together
In this order:- Plug the SO-100 robot arm into the power supply using the black 12V power supply.
- Plug one end of the USB-C cable into the SO-100 robot arm and the other into your computer (laptop, raspberry pi, etc).
- If you have additional cameras, plug them into your computer

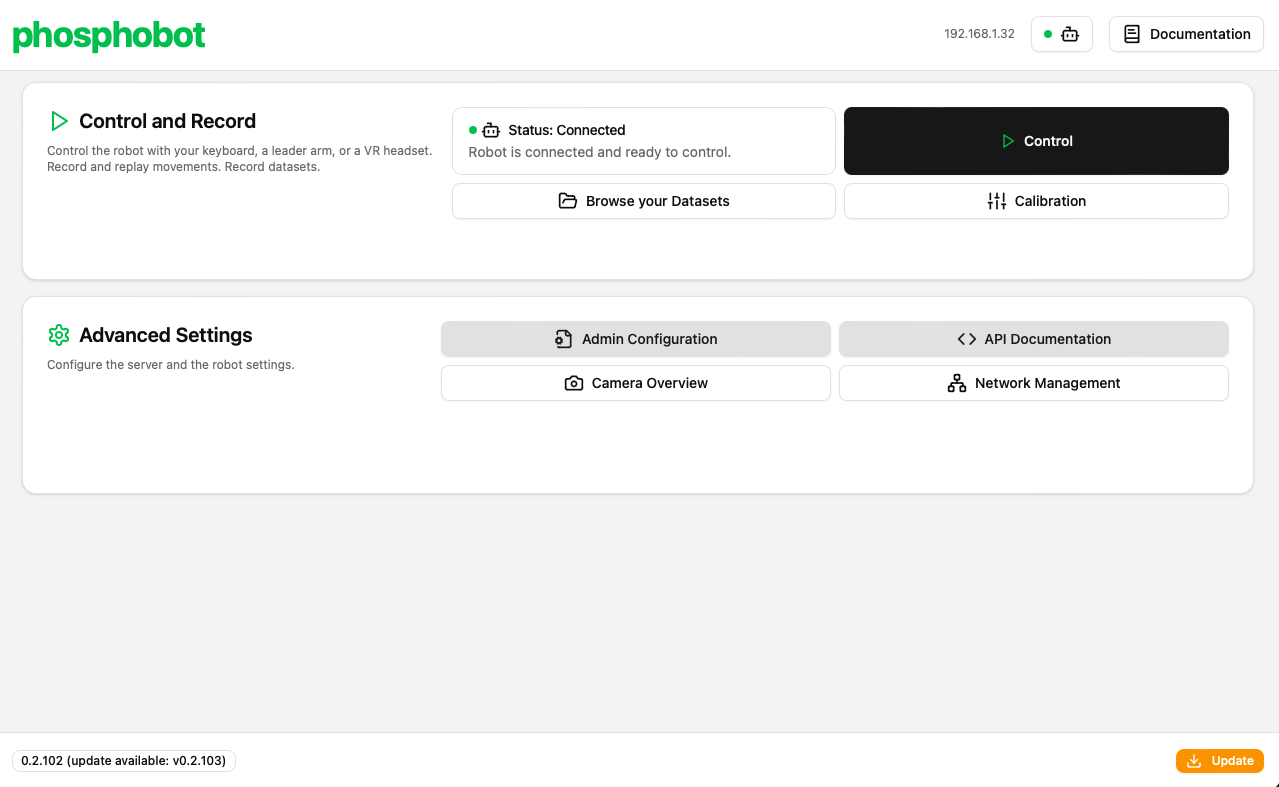
Start phosphobot
Once everything is connected and powered on, run the following command in a terminal to install the phosphobot software:localhost in your web browser to access the phosphobot dashboard. Go to Control to control your robot using only your keyboard!
Calibrate the robot
This step is only relevant if you built your own robot arm: the assembled robots that we ship are already calibrated.
Here are detailed written instructions to calibrate your SO-100 robot arm:
How to calibrate the SO-100 robot arm?
How to calibrate the SO-100 robot arm?
- Go to the page Calibration in the dashboard.
- Make sure to be able to securely catch your robot, as calibration disable torque. This can make your robot fall.
- Follow the instructions on the screen to calibrate your robot.
~/phosphobot/calibration folder of your home directory. You can edit this file in a text editor to further refine the calibration. For example, to tune the PID.
About LeRobot calibration
If you’re using LeRobot framework for training, you’ll need to calibrate the robot with LeRobot after this phosphobot calibration. You need first to calibrate with phosphobot, then with LeRobot. The LeRobot calibration process is compatible with phosphobot, but independent. This only needs to be done once.Start controlling the robot
Your robot is now ready to receive commands! In the dashboard, click the Control button to control the robot arm. In the first tab, you can control the robot with the keyboard. You can also use leader arm control, a gamepad, or a Meta Quest VR headset. Learn more.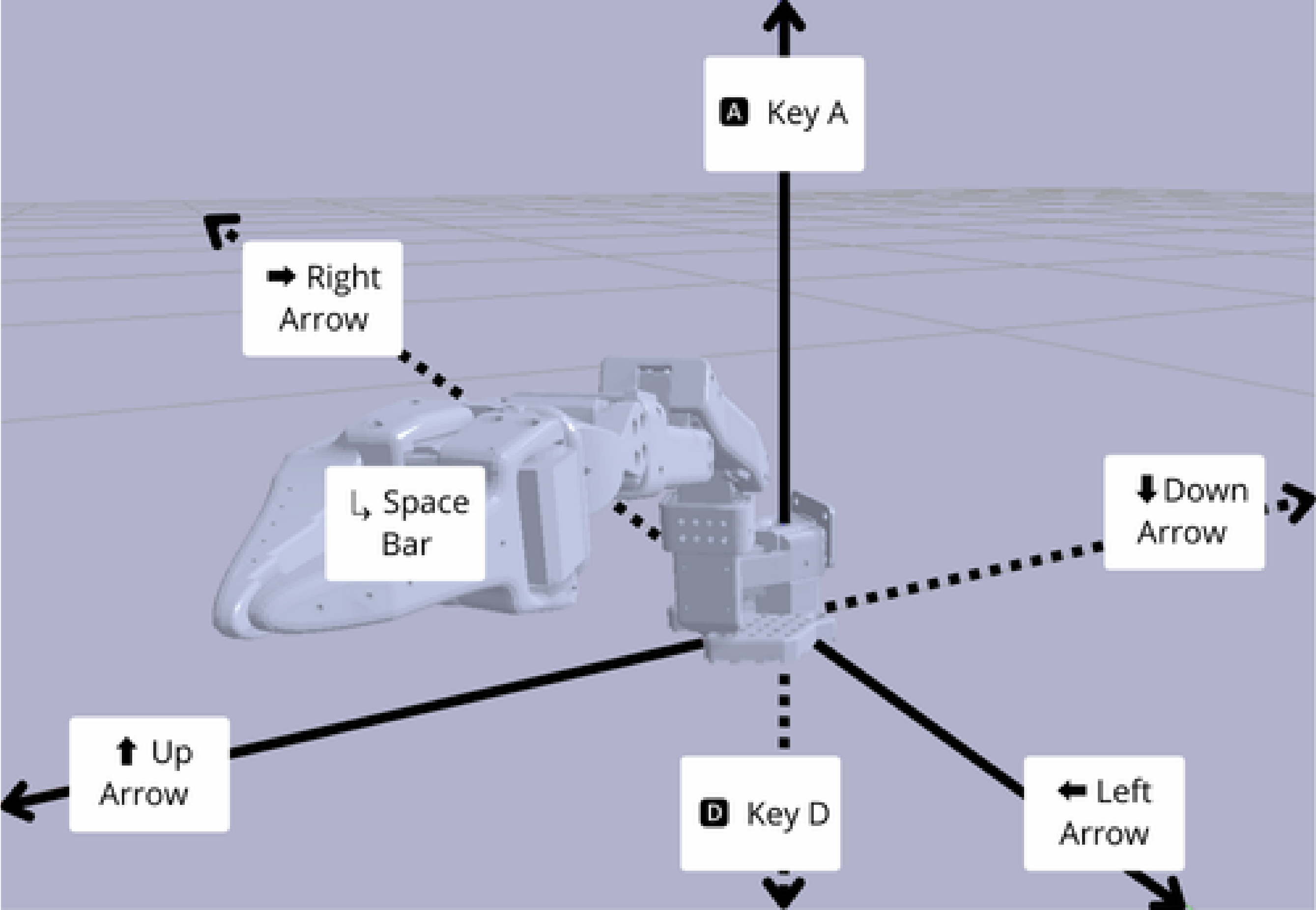
Next steps
You can now control your robot, record your first dataset and train an AI model to make the robot move by itself.Control your robot
Teleoperate a real robot
Record a dataset
How to record a dataset with your robot
Train an AI model
How to train an AI model from a dataset you recorded